最短路径算法——数据结构系列教程(c++版)
梦想不会自己发光,真正闪耀的是那个为梦狂奔的你。献给知行的孩子们!(Eric.He著)
图的最短路径问题是图论中的核心应用问题之一,指的是在带权图中,找到从一个顶点到另一个顶点的路径,使得路径上的边权之和最小。根据图的特性(有向 / 无向、边权正负)和求解需求(单源 / 多源),常用的最短路径算法分为 Dijkstra 算法、Bellman-Ford 算法、Floyd-Warshall 算法 三类。本文将详细讲解三类最短路径算法在图结构中的应用,内容由浅入深,所有代码可直接编译运行。
图结构的实现方式:
学习经典应用场景前,请根据上面的教程封装好自定义图,所有场景实例直接复用
一、基础概念
1.1 关键概念
在学习算法前,先明确几个关键概念:
- 带权图:图的每条边都有一个权重值(可以是距离、时间、成本等)。
- 单源最短路径:从一个固定起点(源点)到其他所有顶点的最短路径。
- 多源最短路径:求解图中任意两个顶点之间的最短路径。
- 负权边:边的权重为负数的边;负权环:路径权重之和为负数的环,存在负权环的图没有最短路径(可以绕环无限减小路径权重)。
1.2 算法对比与选择
| 特性 | Dijkstra 算法 | Bellman-Ford 算法 | Floyd-Warshall 算法 |
|---|---|---|---|
| 问题类型 | 单源最短路径 | 单源最短路径 | 多源最短路径 |
| 负权边支持 | ❌ 不支持 | ✅ 支持 | ✅ 支持 |
| 负权回路检测 | ❌ 不能 | ✅ 能 | ✅ 能 |
| 时间复杂度 | 朴素版 O(v2)、优先队列版 O(e log v) | 朴素版 O(ve)、SPFA O(e)最坏 O(ve) | O(V3) |
| 适用图规模 | 稠密 / 稀疏图 | 小规模图 | 小规模图(n≤200) |
| 核心思想 | 贪心 | 松弛(动态规划) | 动态规划 |
一、Floyd-Warshall(弗洛伊德)
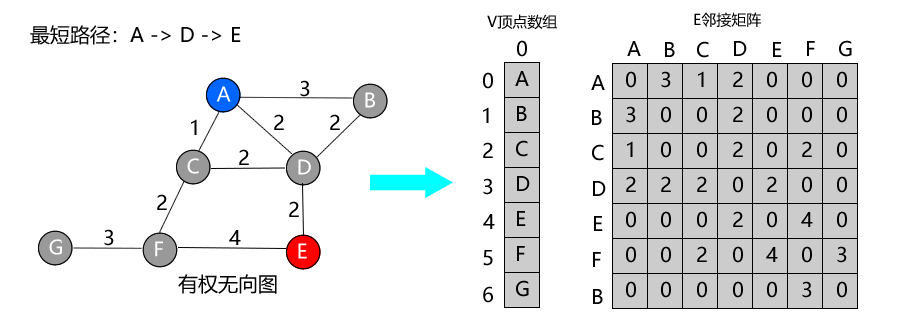
简称Floyd(弗洛伊德),是多源最短路径计算算法,可以计算图中任意两点间的最短路径。Floyed的时间复杂度是O(V³),适用于出现负边权的情况,核心思想是动态规划。
算法原理:
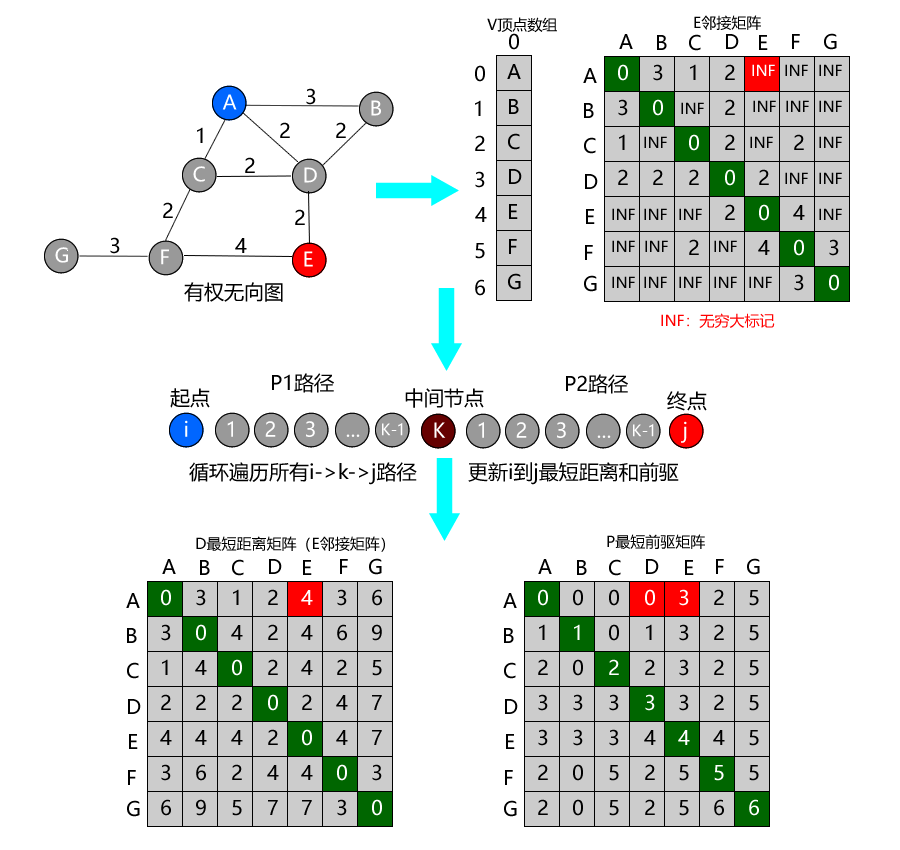
- 用d[i,j]表示i点到j点的最短距离(为了节约空间直接将最短距离存储在E邻接矩阵中),但i到j可能会经过K个顶点才能找到最短路径,则:
- d[i][j]=d[i][k]+d[k][j],其中的k可能为多个点
- 遍历全部顶点,如果出现d[i][j]>d[i][k]+d[k][j],我们就用短的距离替换长的距离,用p[i,j]表示i点到j点的最短路径的前驱,即:
- d[i][j]=d[i][k]+d[k][j];
- p[i][j]=p[k][j];
算法解析:
三层循环,第一层循环中间点k,第二,第三层循环起点终点i、j,如果点i到点k的距离加上点k到点j的距离小于原先点i到点j的距离,那么就用这个更短的路径长度来更新原先点i到点j的距离。
- 初始化距离矩阵和前驱矩阵
- 将自身至自身的距离设置为0
- 初始化路径前驱为自身,将自身至自身的路径前驱设为自身
- 把不相连的点之间的距离设为无穷大(INF),把这两点看作相隔很远,如果两者之间有最短路径的话,就会更新成最短路径的长度。
- 依次遍历取出图中的每个结点作为ij的中间结点去更新ij的最短路径
- 如果ik是相连的,ik是相连的
- 并且ik+kj的距离(经过k点)小于ij(不经过k点)的距离
- 更新为ik+kj的距离和前驱
- 打印任意两点之间的最短路径
- 从终点j反向找前驱,直到起点i
- 逆序输出路径
#include <iostream>
#include <vector>
#include"ArrayGraph.h"
using namespace std;
//Floyd算法计算最短距离和最短前驱
void floydWarshall(ArrayGraph& vGraph, vector>& vPath)
{
// 1. 初始化距离矩阵和前驱矩阵
int n = vGraph.vertexNum;
vPath.resize(n);
for(int i = 0; i < n; ++i)
{
vPath[i].resize(n, NO_EDGE);
}
for(int i = 0; i < n; i++)
{
for(int j = 0; j < n; j++)
{
if(i == j) {
//将自身至自身的距离设置为0
vGraph.graph[i][j] = 0;
// 将自身至自身的路径前驱设为自身
vPath[i][j] = i;
}
else if(vGraph.graph[i][j] != NO_EDGE) {
vPath[i][j] = i;//初始化路径前驱为自身
}
else {
vGraph.graph[i][j] = INF;//把不相连的点之间的距离设为无穷大(INF)
}
}
}
// 2. 依次遍历取出图中的每个结点作为ij的中间结点去更新ij的最短路径
for(int k = 0; k < n; k++)
{
for (int i = 0; i < n; i++)// k作为中间结点更新ij最短路径
{
for (int j = 0; j < n; j++)
{
// 如果ik是相连的 && ki是相连的 && ik+kj的距离(经过k点)小于ij(不经过k点)的距离,就更新为ik+kj的距离和前驱
if(vGraph.graph[i][k] != INF&& vGraph.graph[k][j] != INF && vGraph.graph[i][k] + vGraph.graph[k][j] < vGraph.graph[i][j])
{
vGraph.graph[i][j] = vGraph.graph[i][k] + vGraph.graph[k][j];// 更新距离
vPath[i][j] = vPath[k][j];// 更新前驱
}
}
}
}
}
// 打印距离和前驱矩阵
void printMatrix(ArrayGraph& vGraph, const vector>& vPath) {
// 打印距离矩阵
printf("\n======= 距离矩阵 =======\n");
// 打印顶点名称(表头)
printf(" "); // 对齐
for(int i = 0; i < vGraph.vertexNum; i++) {
printf("%3c", vGraph.vertices[i]);
}
printf("\n");
for(int i = 0; i < vGraph.vertexNum; ++i)
{
printf("%3c",vGraph.vertices[i]);
for(int j=0;j < vGraph.vertexNum;++j)
{
if(vGraph.graph[i][j]==INF)
printf("%3c",'*');
else
printf("%3d",vGraph.graph[i][j]);
}
printf("\n");
}
printf("========================\n");
// 打印前驱矩阵
printf("\n======= 前驱矩阵 =======\n");
// 打印顶点名称(表头)
printf(" "); // 对齐
for(int i = 0; i < vGraph.vertexNum; i++) {
printf("%3c", vGraph.vertices[i]);
}
printf("\n");
for(int i = 0; i < vGraph.vertexNum; ++i)
{
printf("%3c",vGraph.vertices[i]);
for(int j=0;j < vGraph.vertexNum;++j)
{
if(vGraph.graph[i][j]==INF)
printf("%3c",'*');
else
printf("%3d",vPath[i][j]);
}
printf("\n");
}
printf("========================\n");
}
// 打印任意两点之间的最短路径
void printPath(int i, int j, ArrayGraph& graph, const vector<vector<int>>& vPath) {
vector<int> path;
// 1. 从终点j反向找前驱,直到起点i
for (int cur = j; cur != i; cur = vPath[i][cur]) {
path.push_back(cur);
}
path.push_back(i);
// 2. 逆序输出路径
cout << endl;
cout << "从" << graph.vertices[i] << "到" << graph.vertices[j] << "的路径:";
for (auto it = path.rbegin(); it != path.rend(); ++it) {
cout << graph.vertices[*it];
if (it != path.rend() - 1) cout << " -> ";
}
cout << endl;
}
// 测试案例
int main() {
ArrayGraph graph;
vector<vector<int>> path;//前驱矩阵
// 1. 添加顶点(A、B、C、D、E、F、G)
graph.addVertex('A');
graph.addVertex('B');
graph.addVertex('C');
graph.addVertex('D');
graph.addVertex('E');
graph.addVertex('F');
graph.addVertex('G');
// 2. 添加边(有权无向图)
graph.addDirectedEdge('A','B',3);
graph.addDirectedEdge('A','C',1);
graph.addDirectedEdge('A','D',2);
graph.addDirectedEdge('B','A',3);
graph.addDirectedEdge('B','D',2);
graph.addDirectedEdge('C','A',1);
graph.addDirectedEdge('C','D',2);
graph.addDirectedEdge('C','F',2);
graph.addDirectedEdge('D','A',2);
graph.addDirectedEdge('D','B',2);
graph.addDirectedEdge('D','C',2);
graph.addDirectedEdge('D','E',2);
graph.addDirectedEdge('E','D',2);
graph.addDirectedEdge('E','F',4);
graph.addDirectedEdge('F','C',2);
graph.addDirectedEdge('F','E',4);
graph.addDirectedEdge('F','G',3);
graph.addDirectedEdge('G','F',3);
// 3. 打印邻接矩阵
graph.printAdjacency();
// 4. Floyd算法计算最短距离和最短前驱
floydWarshall(graph, path);
// 5.打印距离和路径矩阵
printMatrix(graph, path);
// 6. 打印任意两点之间的最短路径
char start='A';
char target='E';
int startIndex = graph.findVertexIndex(start);
int targetIndex = graph.findVertexIndex(target);
printPath(startIndex,targetIndex,graph, path);
printf("\n最短路径长度:%d\n", graph.graph[startIndex][targetIndex]);
return 0;
}
输出结果
===== 带权邻接矩阵 =====
A B C D E F G
A 0 3 1 2 0 0 0
B 3 0 0 2 0 0 0
C 1 0 0 2 0 2 0
D 2 2 2 0 2 0 0
E 0 0 0 2 0 4 0
F 0 0 2 0 4 0 3
G 0 0 0 0 0 3 0
========================
======= 距离矩阵 =======
A B C D E F G
A 0 3 1 2 4 3 6
B 3 0 4 2 4 6 9
C 1 4 0 2 4 2 5
D 2 2 2 0 2 4 7
E 4 4 4 2 0 4 7
F 3 6 2 4 4 0 3
G 6 9 5 7 7 3 0
========================
======= 前驱矩阵 =======
A B C D E F G
A 0 0 0 0 3 2 5
B 1 1 0 1 3 2 5
C 2 0 2 2 3 2 5
D 3 3 3 3 3 2 5
E 3 3 3 4 4 4 5
F 2 0 5 2 5 5 5
G 2 0 5 2 5 6 6
========================
从A到E的路径:A -> D -> E
最短路径长度:4
三、Dijkstra
Dijkstra(迪杰斯特拉),是求单源最短路径的算法,可以计算从一个源节点出发,到其他所有节点的最短路径。Dijkstra的时间复杂度是O(E log V),Dijkstra算法存在的问题是不支持图中带负权路径。核心思想是贪心策略。
算法原理:
- 针对一个带权图G,将所有结点分为两组S和Q
- S是已经确定最短路径的结点集合
- Q是未确定最短路径的结点集合
- 每次从Q中找出一个从起点到该结点代价最小的结点u ,将u从Q中移出,并放入S中,对u的每一个相邻结点v(且v不在S中)进行松弛操作。
- 松弛即对每一个相邻结点v ,判断源节点s到结点u 的代价与u 到v 的代价之和是否比原来s 到v 的代价更小
- 若代价比原来小则要将s 到v 的代价更新为s 到u 与u 到v 的代价之和,否则维持原样
- 如此一直循环直至集合Q 为空,即所有节点都已经查找过一遍并确定了最短路径
算法解析:
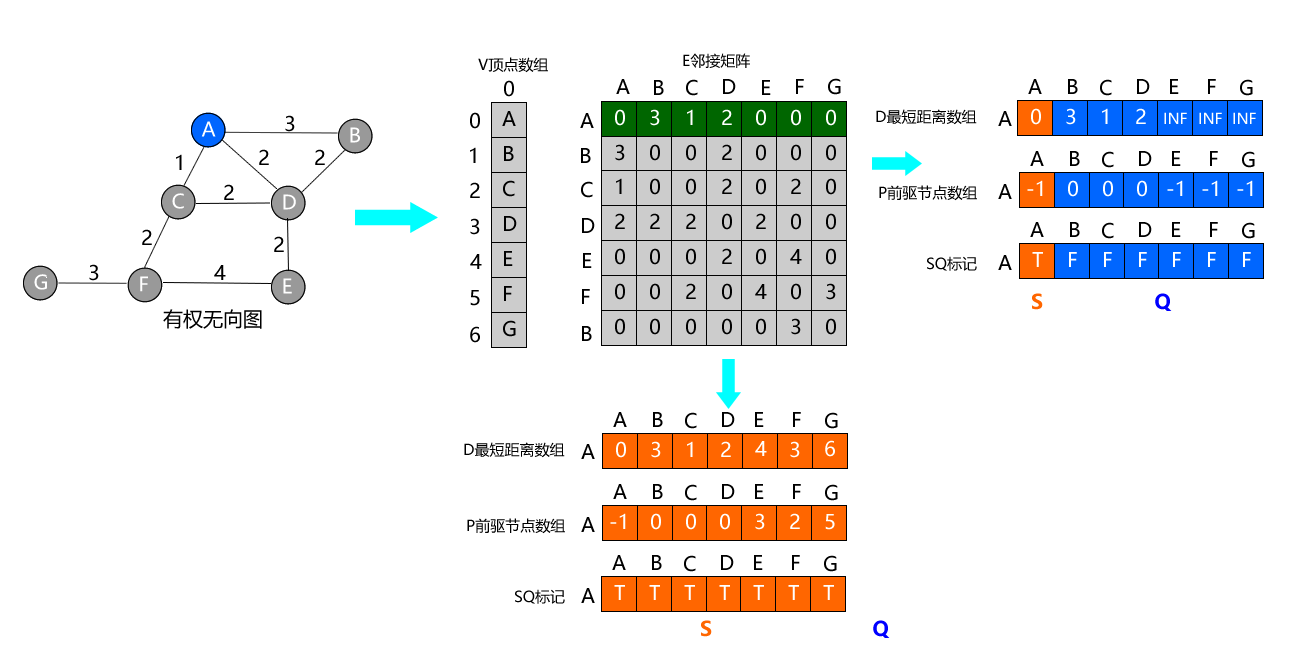
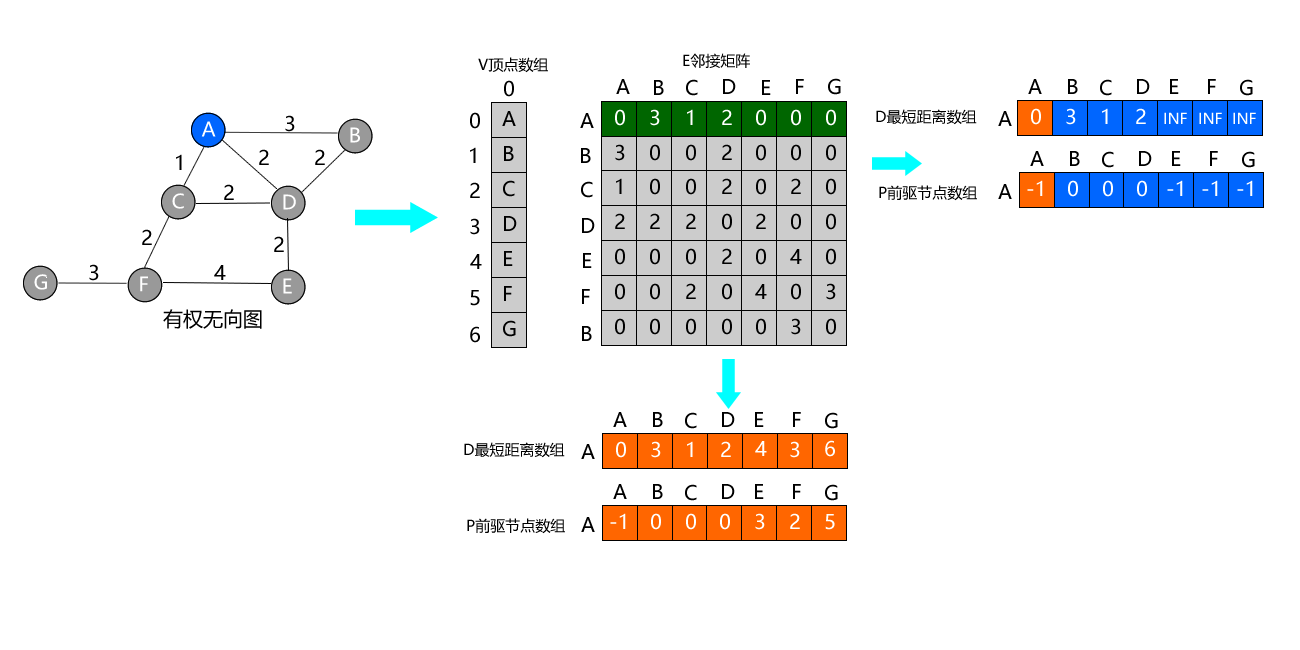
- 初始化dist距离、pre前驱和sq数组
- 初始化sq默认为false,false代表未确定最短路径的结点集合Q,true代表已经确定最短路径的结点集合S
- 初始化起始顶点到自身距离为0,自身无前驱(NO_PRE)
- 初始化起始顶点的直连边的dist距离为权值,直连边的pre前驱为起始顶点
- 初始化其它顶点的dist距离为无穷大(INF),pre前驱为无前驱(NO_PRE)
- 依次计算每个节点的距离和前驱
- 从Q中找出一个从起点到该结点代价最小的结点u
- 将u从Q中移出,并放入S中
- 对u的每一个相邻结点v进行松驰操作
- 打印最短路径
- 从终点递归回溯前驱数组
- 直到起点或无路径
#include <iostream>
#include"ArrayGraph.h"
using namespace std;
// 打印dist距离、pre前驱和sq数组
void printArray(ArrayGraph& vGraph, int dist[], int pre[], bool sq[]) {
printf("===========================\n");
printf("距离:");
for(int d=0;d < vGraph.vertexNum;d++)
{
if(dist[d]==INF) printf("%3c",'*'); else printf("%3d",dist[d]);
}
printf("\n");
printf("前驱:");
for(int d=0;d < vGraph.vertexNum;d++)
{
printf("%3d",pre[d]);
}
printf("\n");
printf("S Q:");
for(int d=0;d < vGraph.vertexNum;d++)
{
printf("%3d",sq[d]);
}
printf("\n");
printf("===========================\n");
}
// 打印最短路径
void printDijkstraPath(ArrayGraph& graph, int pre[], int startIndex, int targetIndex) {
if (targetIndex == startIndex) {
printf("%c", graph.vertices[targetIndex]);
return;
}
if (pre[targetIndex] == NO_PRE) {
printf("无路径");
return;
}
// 递归打印前驱路径
printDijkstraPath( graph, pre, startIndex, pre[targetIndex]);
printf(" -> %c", graph.vertices[targetIndex]);
}
//Dijkstra算法:计算起始顶点到所有顶点的最短路径 startIndex 起始顶点索引 dist 输出参数:存储起始顶点到各顶点的最短距离 pre 输出参数:存储各顶点的路径前驱索引
void dijkstra(ArrayGraph& vGraph, int startIndex, int dist[], int pre[], bool sq[]) {
int n = vGraph.vertexNum;
memset(sq, false, MAX_VERTEX);//初始化sq默认为false,false代表未确定最短路径的结点集合Q,true代表已经确定最短路径的结点集合S
// 1. 初始化距离和前驱数组
for (int i = 0; i < n; i++) {
if (i == startIndex) {
dist[i] = 0; // 起始顶点到自身距离为0
pre[i] = NO_PRE; // 自身无前驱
} else if (vGraph.graph[startIndex][i] != NO_EDGE) {
dist[i] = vGraph.graph[startIndex][i]; // 初始化起始顶点的直连边的dist距离为权值
pre[i] = startIndex; // 初始化起始顶点的直连边的pre前驱为起始顶点
} else {
dist[i] = INF; // 初始化其它顶点的dist距离为无穷大(INF)
pre[i] = NO_PRE; // 初始化其它顶点的pre前驱为无前驱(NO_PRE)
}
}
sq[startIndex] = true;
// 2. 依次计算每个节点的距离和前驱
for (int i = 1; i < n; i++) {
// 从Q中找出一个从起点到该结点代价最小的结点u
int u = 0;
int min = INF;
for (int i = 0; i < n; i++) {
if (!sq[i] && dist[i] < min) {
min = dist[i];
u = i;
}
}
if (u == -1) break; // 所有可达顶点已处理
sq[u] = true;// 将u从Q中移出,并放入S中
// 对u的每一个相邻结点v进行松驰操作
for (int v = 0; v < n; v++) {
if (!sq[v] && vGraph.graph[u][v] != NO_EDGE && dist[u] != INF) {
if (dist[u] + vGraph.graph[u][v] < dist[v]) {
dist[v] = dist[u] + vGraph.graph[u][v];//更新距离
pre[v] = u; // 更新前驱
}
}
}
}
}
// 测试案例
int main() {
int dist[MAX_VERTEX];
int pre[MAX_VERTEX];
bool sq[MAX_VERTEX];
ArrayGraph graph;
// 1. 添加顶点(A、B、C、D、E、F、G)
graph.addVertex('A');
graph.addVertex('B');
graph.addVertex('C');
graph.addVertex('D');
graph.addVertex('E');
graph.addVertex('F');
graph.addVertex('G');
// 2. 添加边(有权无向图)
graph.addDirectedEdge('A','B',3);
graph.addDirectedEdge('A','C',1);
graph.addDirectedEdge('A','D',2);
graph.addDirectedEdge('B','A',3);
graph.addDirectedEdge('B','D',2);
graph.addDirectedEdge('C','A',1);
graph.addDirectedEdge('C','D',2);
graph.addDirectedEdge('C','F',2);
graph.addDirectedEdge('D','A',2);
graph.addDirectedEdge('D','B',2);
graph.addDirectedEdge('D','C',2);
graph.addDirectedEdge('D','E',2);
graph.addDirectedEdge('E','D',2);
graph.addDirectedEdge('E','F',4);
graph.addDirectedEdge('F','C',2);
graph.addDirectedEdge('F','E',4);
graph.addDirectedEdge('F','G',3);
graph.addDirectedEdge('G','F',3);
// 3. 打印邻接矩阵
graph.printAdjacency();
// 4. 定义起点和终点
char start='A';
char target='F';
int startIndex = graph.findVertexIndex(start);
int targetIndex = graph.findVertexIndex(target);
// 5. 计算距离和前驱
dijkstra(graph,startIndex,dist,pre,sq);
// 6. 打印距离和前驱
printArray(graph, dist, pre,sq);
// 7. 打印路径(同一顶点,路径长度为0)
if (startIndex == targetIndex) {
printf("\n===== 最短路径(%c → %c)=====\n", start, target);
printf("路径:%c\n", start);
printf("最短路径长度:0\n");
}
// 7. 打印路径
printf("\n===== 最短路径(%c → %c)=====\n", start, target);
if (dist[targetIndex] == INF) {
printf("路径:无\n");
printf("最短路径长度:∞(无连通路径)\n");
} else {
printf("路径:");
printDijkstraPath(graph, pre, startIndex, targetIndex);
printf("\n最短路径长度:%d\n", dist[targetIndex]);
}
return 0;
}
输出结果
====== 带权邻接矩阵 ======
A B C D E F G
A 0 3 1 2 0 0 0
B 3 0 0 2 0 0 0
C 1 0 0 2 0 2 0
D 2 2 2 0 2 0 0
E 0 0 0 2 0 4 0
F 0 0 2 0 4 0 3
G 0 0 0 0 0 3 0
========================
===========================
距离: 0 3 1 2 4 3 6
前驱: -1 0 0 0 3 2 5
S Q: 1 1 1 1 1 1 1
===========================
===== 最短路径(A → E)=====
路径:A -> D -> E
最短路径长度:4
四、Bellman-Ford
Bellman-Ford(贝尔曼-福特)算法可以解决负权图的单源最短路径问题,如果图中存在负权回路(负权环)的情况,这种情况是求不出最短路径的。
时间复杂度 O(N*E) (N是顶点数,E是边数)普遍是要高于Dijkstra(迪杰斯特拉)算法。如果我们使用邻接矩阵实现,那么时间复杂度就是O(N^3),因为邻接矩阵的话遍历所有的边就需要O(N^2)。
算法原理:
- Bellman-Ford(贝尔曼-福特)算法与Dijkstra(迪杰斯特拉)算法类似:
- 都以松弛操作为基础,即估计的最短路径值渐渐地被更加准确的值替代,直至得到最优解。
- 只不过Dijkstra(迪杰斯特拉)算法每次去选到起点最短的边,然后去向外扩展更新(即对这条边的终止顶点进行松弛),直至所有的边都更新一遍就可以得到结果(因为它每次选的都是最小的);
- 而Bellman-Ford(贝尔曼-福特)算法不管边的大小,就是比较暴力的把所有的边都更新(即先后对所有的顶点的相邻顶点进行松弛),也因此它一遍过后可能得不出最短的路径,可能需要进行多次迭代。
算法解析:
- 初始化dist距离、pre前驱数组
- 初始化起始顶点到自身距离为0,自身无前驱(NO_PRE)
- 初始化起始顶点的直连边的dist距离为权值,直连边的pre前驱为起始顶点
- 初始化其它顶点的dist距离为无穷大(INF),pre前驱为无前驱(NO_PRE)
- 依次计算每个节点的距离和前驱
- 对图中的每一条边进行V-1次遍历,每次遍历都尝试通过当前边来更新终点的最短距离估计。
- 如果通过当前边可以找到一个更短的路径,则更新该终点的距离值和前驱。
- 打印最短路径
- 从终点递归回溯前驱数组
- 直到起点或无路径
#include <iostream>
#include"ArrayGraph.h"
using namespace std;
// 打印dist距离、pre前驱
void printBellmanArray(ArrayGraph& vGraph, int dist[], int pre[]) {
printf("===========================\n");
printf("距离:");
for(int d=0;d < vGraph.vertexNum;d++)
{
if(dist[d]==INF) printf("%3c",'*'); else printf("%3d",dist[d]);
}
printf("\n");
printf("前驱:");
for(int d=0;d < vGraph.vertexNum;d++)
{
printf("%3d",pre[d]);
}
printf("\n");
printf("===========================\n");
}
// 打印最短路径
void printBellmanPath(ArrayGraph& graph, int pre[], int startIndex, int targetIndex) {
if (targetIndex == startIndex) {
printf("%c", graph.vertices[targetIndex]);
return;
}
if (pre[targetIndex] == NO_PRE) {
printf("无路径");
return;
}
// 递归打印前驱路径
printDijkstraPath( graph, pre, startIndex, pre[targetIndex]);
printf(" -> %c", graph.vertices[targetIndex]);
}
//Bellman算法:计算起始顶点到所有顶点的最短路径 startIndex 起始顶点索引 dist 输出参数:存储起始顶点到各顶点的最短距离 pre 输出参数:存储各顶点的路径前驱索引
void bellman(ArrayGraph& vGraph, int startIndex, int dist[], int pre[]) {
int n = vGraph.vertexNum;
bool flag;
// 1. 初始化距离和前驱数组
for (int i = 0; i < n; i++) {
if (i == startIndex) {
dist[i] = 0; // 起始顶点到自身距离为0
pre[i] = NO_PRE; // 自身无前驱
} else if (vGraph.graph[startIndex][i] != NO_EDGE) {
dist[i] = vGraph.graph[startIndex][i]; // 初始化起始顶点的直连边的dist距离为权值
pre[i] = startIndex; // 初始化起始顶点的直连边的pre前驱为起始顶点
} else {
dist[i] = INF; // 初始化其它顶点的dist距离为无穷大(INF)
pre[i] = NO_PRE; // 初始化其它顶点的pre前驱为无前驱(NO_PRE)
}
}
// 2. 依次计算每个节点的距离和前驱
for (int k = 1; k < n; k++) {
flag = false;
for(int i = 0; i < n; i++)
{
for(int j = 0; j < n; j++)
{
if(vGraph.graph[i][j] != NO_EDGE && dist[i] != INF && dist[i]+vGraph.graph[i][j] < dist[j])
{
dist[j] = dist[i]+vGraph.graph[i][j];
pre[j] = i;
flag = true;
}
}
}
if(!flag) break;
}
}
// 测试案例
int main() {
int dist[MAX_VERTEX];
int pre[MAX_VERTEX];
bool sq[MAX_VERTEX];
ArrayGraph graph;
// 1. 添加顶点(A、B、C、D、E、F、G)
graph.addVertex('A');
graph.addVertex('B');
graph.addVertex('C');
graph.addVertex('D');
graph.addVertex('E');
graph.addVertex('F');
graph.addVertex('G');
// 2. 添加边(有权无向图)
graph.addDirectedEdge('A','B',3);
graph.addDirectedEdge('A','C',1);
graph.addDirectedEdge('A','D',2);
graph.addDirectedEdge('B','A',3);
graph.addDirectedEdge('B','D',2);
graph.addDirectedEdge('C','A',1);
graph.addDirectedEdge('C','D',2);
graph.addDirectedEdge('C','F',2);
graph.addDirectedEdge('D','A',2);
graph.addDirectedEdge('D','B',2);
graph.addDirectedEdge('D','C',2);
graph.addDirectedEdge('D','E',2);
graph.addDirectedEdge('E','D',2);
graph.addDirectedEdge('E','F',4);
graph.addDirectedEdge('F','C',2);
graph.addDirectedEdge('F','E',4);
graph.addDirectedEdge('F','G',3);
graph.addDirectedEdge('G','F',3);
// 3. 打印邻接矩阵
graph.printAdjacency();
// 4. 定义起点和终点
char start='A';
char target='G';
int startIndex = graph.findVertexIndex(start);
int targetIndex = graph.findVertexIndex(target);
// 5. 计算距离和前驱
bellman(graph,startIndex,dist,pre);
// 6. 打印距离和前驱
printBellmanArray(graph, dist, pre);
// 7. 打印路径(同一顶点,路径长度为0)
if (startIndex == targetIndex) {
printf("\n===== 最短路径(%c → %c)=====\n", start, target);
printf("路径:%c\n", start);
printf("最短路径长度:0\n");
}
// 7. 打印路径
printf("\n===== 最短路径(%c → %c)=====\n", start, target);
if (dist[targetIndex] == INF) {
printf("路径:无\n");
printf("最短路径长度:∞(无连通路径)\n");
} else {
printf("路径:");
printBellmanPath(graph, pre, startIndex, targetIndex);
printf("\n最短路径长度:%d\n", dist[targetIndex]);
}
return 0;
}
输出结果
===== 带权邻接矩阵 =====
A B C D E F G
A 0 3 1 2 0 0 0
B 3 0 0 2 0 0 0
C 1 0 0 2 0 2 0
D 2 2 2 0 2 0 0
E 0 0 0 2 0 4 0
F 0 0 2 0 4 0 3
G 0 0 0 0 0 3 0
========================
===========================
距离: 0 3 1 2 4 3 6
前驱: -1 0 0 0 3 2 5
===========================
===== 最短路径(A → G)=====
路径:A -> C -> F -> G
最短路径长度:6
返回顶部